
 AVR Deices – конструкции на микроконтроллерах AVR и не только…
AVR Deices – конструкции на микроконтроллерах AVR и не только…

[lang_ru]
Менял тут железо на сервере, и после переустановки и конфигурирования всяческих скриптов на нем, напоролся на старую папочку с фотками с моей пред-пред-пред-предыдущей работы, где я делал стенд показательный, типа показывать клиентам, во как наши могут :)[/lang_ru]
[lang_de]Habe vor kurzem die Hardware auf meinem Server gewechselt, und habe eine Verzeichnis mit alten Fotos entdeckt, die noch in der Zeit meiner Vor-Vor-Vor-Vorheriger Frima gemacht wurde. Damals habe ich einen Ausstellungsstand gebaut, um unseren Kunden zu zeigen : "So können wir auch![/lang_de]"
[lang_ru]Ну а так как прошло уже слава богу больше 6-ти лет (жуть, как давно это оказывается было), то можно уже и рассказать, никаких там секретов особо нет.[/lang_ru]
[lang_de]Und weil es schon mehr als 6 Jahre vorbei sind, kann man schon darüber erzellen. Da gibt es keine Geheimnisse mehr. [/lang_de]
[lang_ru]Ну, поехали...[/lang_ru]
[lang_de]Also, los gehts...[/lang_de]
[lang_ru] Идея была — показать, что мы умеем работать с шиной FlexRay. Это такая шина данных реального времени, продублированная, и с временными слотами в пакетах, чтобы можно было быть уверенным, что все данные пришли вовремя, и не потерялись, а если потерялись, то быстренько из перезапросить у посылающего.[/lang_ru]
[lang_de]die Gedanke war zu zeigen, dass wir mit dem Bus FlexRay arbeiten können. Das ist ein serielles, deterministisches und fehlertolerantes Feldbussystem für den Einsatz zum Beispiel im Automobil.[/lang_de]
[lang_ru]Используется в приложениях, где требуется высокая скорость передачи небольших, но важных данных, для, например, контроля жизненно важных узлов механизмов. Пример, насколько я знаю BMW-X5 пользует вовсю.[/lang_ru]
[lang_de]So weit ich weiss, das Bus ist im BMW X5 eingesetzt.[/lang_de]
[lang_ru]Ну задачу поставили, я подумал, а почему бы не изобрести велосипед? И предложил начальству такой вот проектик, в котором руль «рулит» колеса как раз по 2*2-м проводам. Ну они, конечно, согласились, но сильно денег не выделили, потому пришлось собирать это все из подручных материалов.[/lang_ru]
[lang_de]So, der Task ist definiert, und ich habe gedacht, warum denn nicht, einen Fahrrad noch mal zu erfinden. Und habe vorgeschlagen einen Projekt zu bauen, wo man mit einem Lenkrad über 2*2 Drähte die Räder steuert. Die Chefs haben zugesagt, und haben auch bisschen Geld dafür ausgegeben. [/lang_de]
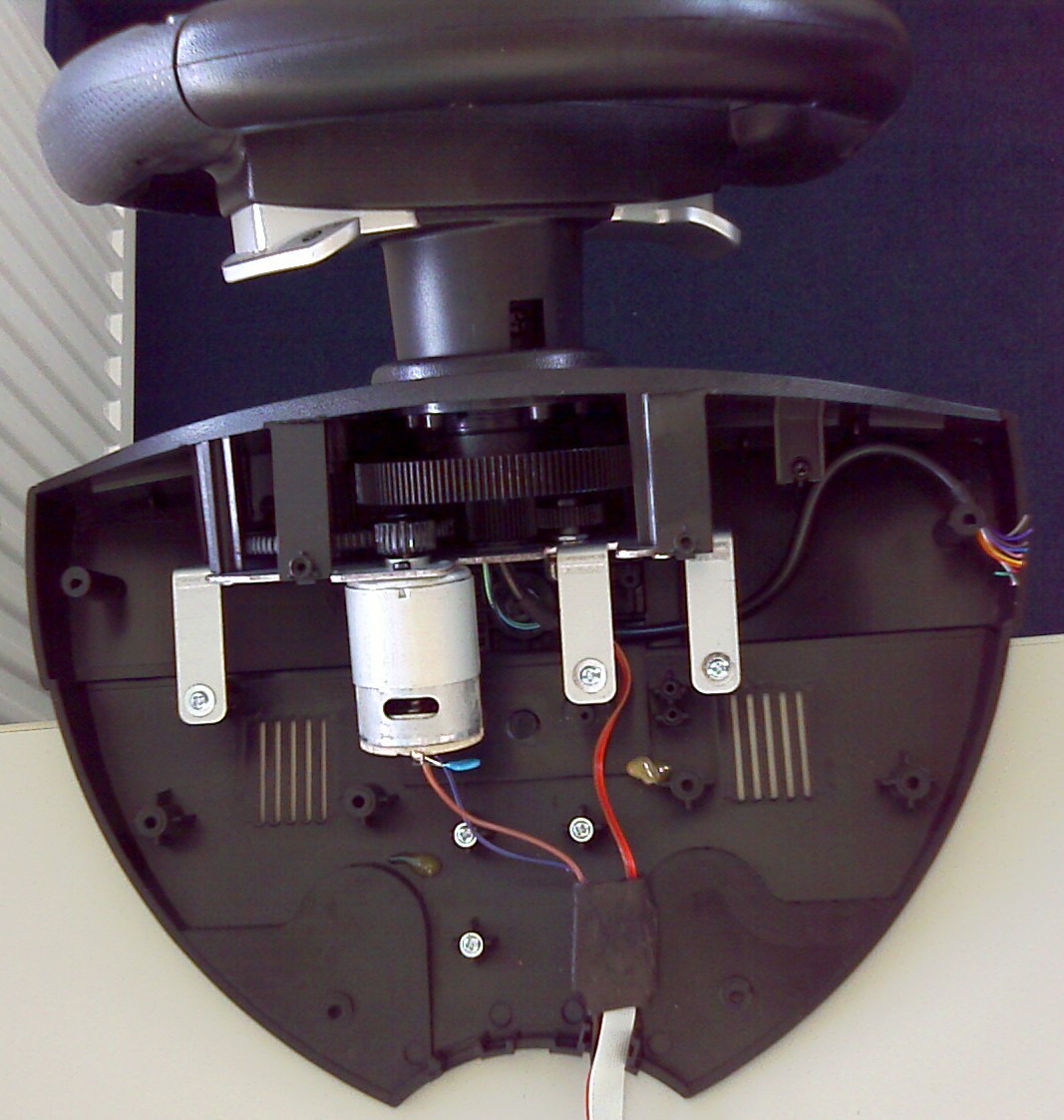
[lang_ru]И так — руль уже вы видели чуть выше. Естественно выбрал руль с отдачей (они сейчас, в принципе, все такие), и выкинул всю внутреннюю электронику кроме мотора с шестернями и переменника, указывающего текущую позицию.[/lang_ru]
[lang_de]So. Den Lenkrad selbst habt Ihr schon mal gesehen da oben. Ich habe so einen mit dem Fiedback ausgewählt, und die ganze Elektronik, außer den Motor und einen variablen Wiederstand, rausgeschmissen. [/lang_de]
[lang_ru]Потом поехал в местный магазинчик Лего и нашел там ихний моторчик. Воткнул и в него переменник:[/lang_ru]
[lang_de]Dann habe ich einen Motor bei Lego gekauft, und dort einen variablen Wiederstand eingebaut.[/lang_de]
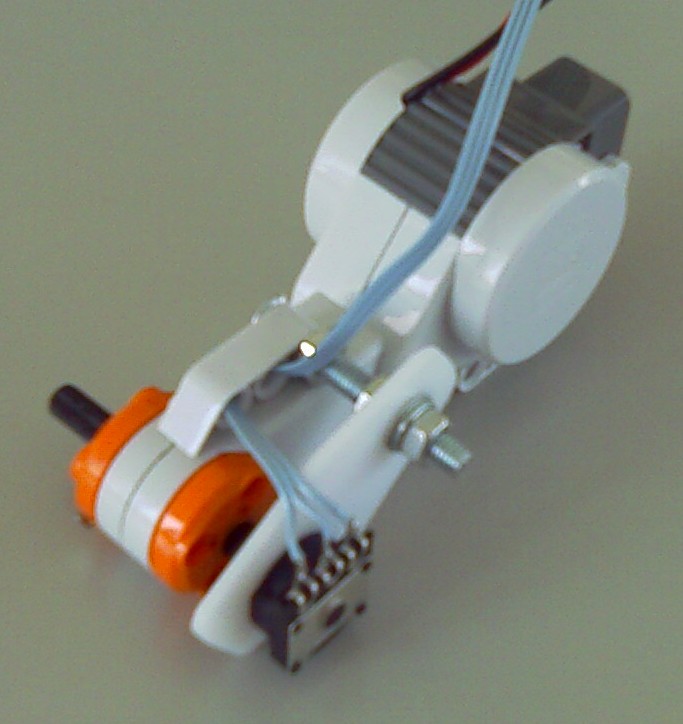
[lang_ru]Этим моторчиком будем крутить колеса на модельки.[/lang_ru]
[lang_de]Der Motor wird danach die Räder am Automodel steuern.[/lang_de]
[lang_ru]Модель машинки выбрал довольно прикольную. С большими колесами, что потом себя очень зарекомендовало, так как связь то между колесами и рулем была двухсторонняя, и за колеса можно было удобно ухватываться, чтобы их провернуть. Так вот — модель — Монстер Трак. Он тут продавался не сильно дорого, так как без начинки, только рама, да пластиковый кожух. Раму еще надо было собирать, что можно лицезреть ниже.[/lang_ru]
[lang_de]Für das Automodel habe ich einen lüstigen Monster Truck gewählt, mit den großen Rädern, so dass man die anfassen kann um die zu drehen. Das Model muss man noch zusammen bauen. [/lang_de]

[lang_ru]Ну и надо было это все красиво закрепить на столе, чтобы ничего никуда не уехало само по себе. По этому из профилей (кстати, самая дорогая часть в проекте вышла 🙂 ) скрутил такой вот остов:[/lang_ru]
[lang_de]Und man müsste das ganze irgendwie am Tisch schön und richtig fest zu platzieren. Dafür habe ich aus Alu Profile so einen Rahmen gebaut. Übrigens, dass ist das teuerste Teil des Projekts gewesen.[/lang_de]

[lang_ru]Пока собирал раму — параллельно писал софтинку для двух эвалюэйшенов (от кого они — уже не скажу — за 6 лет все быстро выветрилось за ненадобностью в данный момент), на которых стоят довольно шустрые процы, какие — не помню уже, но с довольно богатой периферией, включая FlexRay контроллер, ЦАП, ШИМы, 4 канала было точно, так как два мотора контролировались в оба направления вращения. Т.е. там на плате уже был полноценный H — мост для подключения моторов.[/lang_ru]
[lang_de]Während ich die Karosserie und Rahmen zusammen gebaut hatte, habe ich parallel die Software für zwei Eval-Boards geschrieben und getestet. Die ganze Namen und Bezeichnungen den Eval-Boards und auch den CPUs habe ich seit 6 Jahren total vergessen. Aber man muss sagen, dass die CPUs ganz gut mit der Peripherie ausgestattet sind: FlexRay Kontroller, ADC, PWMs, mindestens 4 gab es, da es zwei Motoren angesteuert werden müssen. Es sind auch vollständige H-Bridges auf den Platinen drauf.[/lang_de]
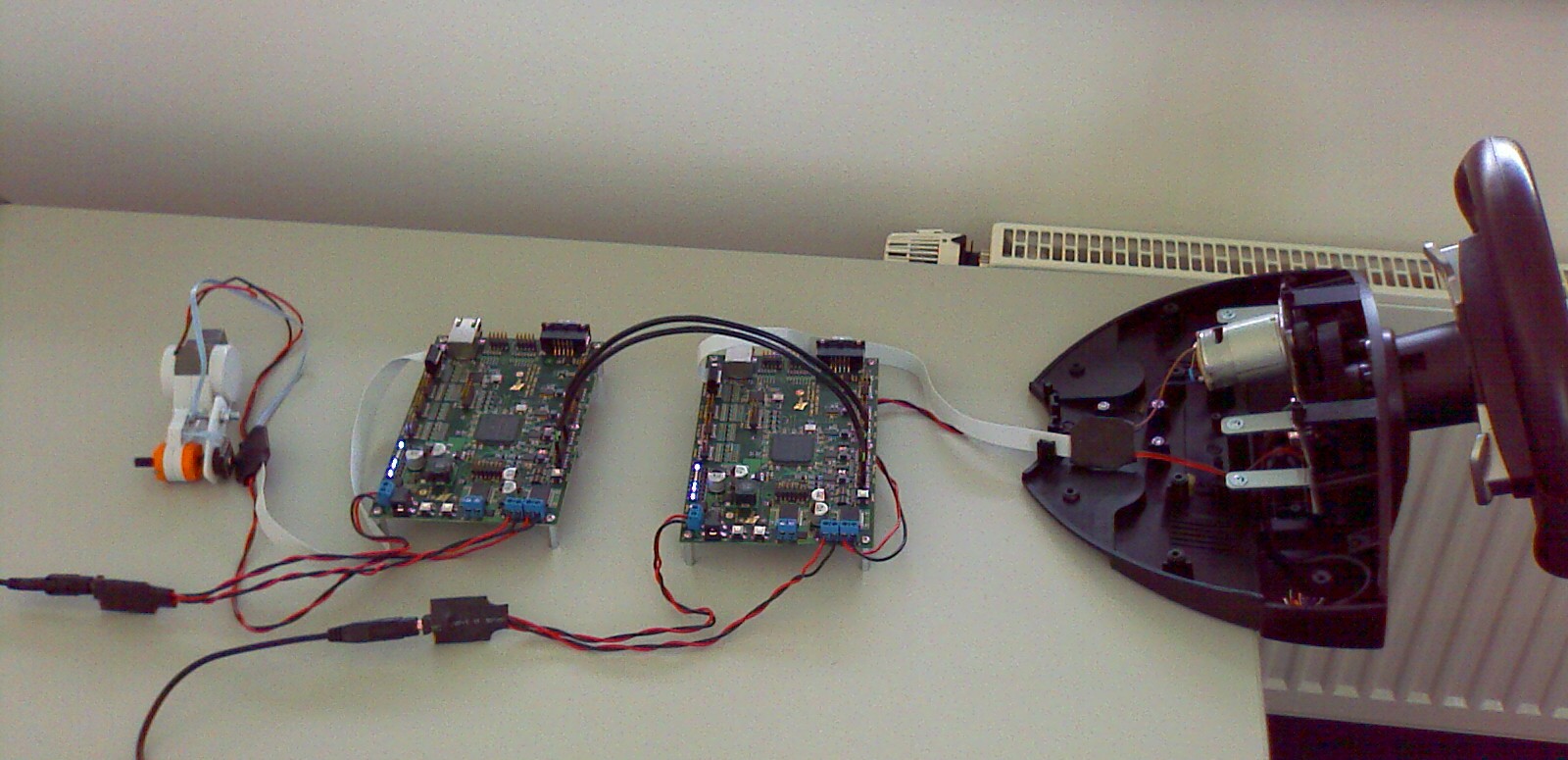
[lang_ru]Ну и осталось это все собрать вместе. Получился вот такой вот аккуратненький стендик.[/lang_ru]
[lang_de]Und es ist noch geblieben, das ganze zusammen bauen.[/lang_de]



[lang_ru]Ну вот так вот поностальгировал чуток. Жаль, что не записал тогда видео процесса, так что придется вам верить на слово, что когда крутишь руль, то крутятся и колеса, и наоборот, когда крутишь колеса — то крутится руль.[/lang_ru]
[lang_de]Es ist ja echt schade, dass ich das Video von dem Arbeitsprozess nicht aufgenommen habe. Also, Ihr müsst mir glauben, dass wenn man den Lenkrad dreht, dann drehen sich die Räder, und umgekehrt, wenn man die Räder dreht, dann dreht sich den Lenkrad. [/lang_de]
[lang_ru]А. Совсем забыл, позже, где то через месяц начальство дало небольшой компик, с платкой сниффером FlexRey-я и сказало — сделай ка красивый софтик тут графический, который бы показывал данные, которые ходят по этой шинке когда крутишь руль.[/lang_ru]
[lang_de]Ah. Habe ganz vergessen. Zum Schluss, nach ca. 1 Monat, hat man mich gebeten, auf Basis von einem Industrie PC mit internen Sniffer Karte für FlexRay Bus, die Software zu erstellen, die dann den Bus lauscht und alle Daten, die da fliesen, ausgibt. [/lang_de]
[lang_ru]Ну нефиг делать, сказал я, и написал небольшую прогу под QT, благо библиотеки к платке снифферу были и работали нормально. Еще добавил указатель направления, куда колеса направлены.[/lang_ru]
[lang_de]Kein Problem. Mit der Hilfe des QT Bibliothek habe ich so eine Software erstellt und auch einen Zeiger dazu gefügt, der dann die Richtung dem Rädeln zeigte. [/lang_de]
[lang_ru]Потом начальство эту всю установку показывало на местной выставке EmbeddedWorld в 2009-м году. Я даже видел ее там, когда проходил мимо стенда нашей фирмы. И кажется, что даже сфоткал, но вот именно этих фоток уже не нашел.[/lang_ru]
[lang_de]Im Jahr 2009 wurde dieses Ausstellungsstück sogar bei der Messe Embedded World dargestellt. Ich habe den Stand sogar fotografiert, leider finde ich die Fotos davon nicht mehr. [/lang_de]
[lang_ru]Так что, если вдруг кто был в феврале 2009-го в Нюрнберге и ходил мимо стенда фирмы ICT, и фоткал этот экспонат — огромная просьба — поделитесь фотками :)[/lang_ru]
[lang_de]Also, falls jemand im Februar 2009 bei der Messe im Nürnberg gewesen war, und bei dem Stand der Firma ICT vorbei gegangen ist, und sogar die Fotos von dem Austellungsstand gemacht hat, bitte, schickt mir die Fotos. Ich werde dafür sehr dankbar.[/lang_de]
[lang_ru]Ну а пока на этом все,[/lang_ru]
[lang_de]Also, für Heute ist es alles [/lang_de]
[lang_ru]до скорого![/lang_ru]
[lang_de]Bis Bald.[/lang_de]



Leave a Reply
You must be logged in to post a comment.